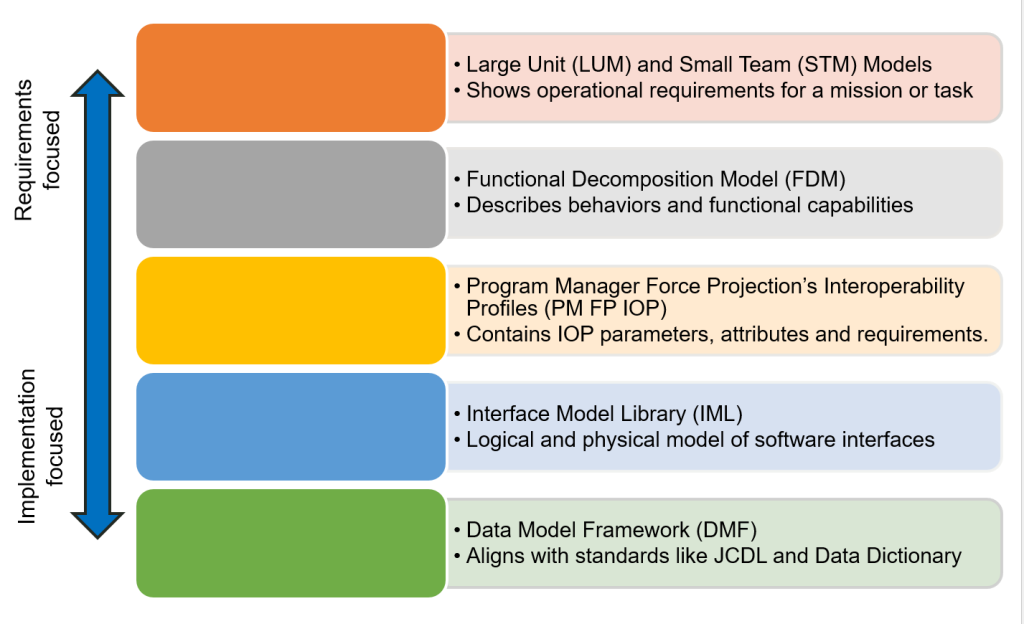
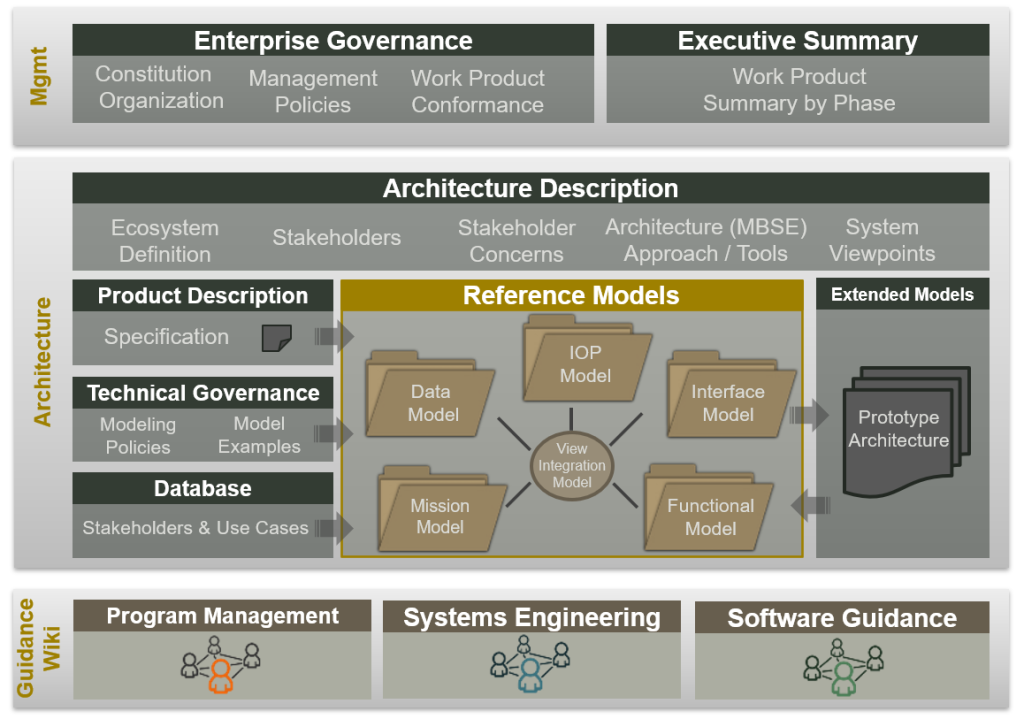
Models
AGVRA’s libraries of reference models and reusable model patterns are developed in Cameo Systems Modeler. They aid in the definition of technical architectures in acquisition programs by leveraging open processes and shared information models through a common framework, domain specific models, standards profiles, reference architectures, and guidance.
In addition to the models listed, there are example models available, including a View Integration Model which demonstrates how all of the models relate to one another.
Design Objectives
- Provide a minimum but essential set of model-based enablers required to support effective AGV system life cycle management.
- Enable rapid generation of high-quality Physical System Architectures (PSA) by leveraging architecture knowledge and artifacts over the entire AGV domain, where a PSA is defined as the “as implemented” architecture of a system.
- Support product line plug and play into open and compatible target architectures.
- Support Modular Open Systems Approach (MOSA) principles through focus on government-owned open architectures which allows stakeholders to establish product lines and conduct acquisition trades within the supply chain.
Model Distribution
AGVRA models are distributed under Government Purpose Rights licensing.
To obtain access, first request an account on the GVSC GDEV Atlassian-based platform. In addition to the models, there you will find a user guidance Wiki, a suite of examples, including a View Integration Model that shows how all of the provided models can be linked together, and tutorial videos.
The models are also referenced in the ROS-M Registry where you can also find information about ROS packages built for military applications.
If you encounter any issues with these processes, please contact the GVSC GVR Representative below.